 В Москве прошла Третья специализированная выставка «Робототехника и искусственный интеллект», на которой были представлены отечественные разработки и опыт применения новейших технологий. Выставочная экспозиция, собравшая, по данным организатора, – «ОВК «БИЗОН» – более 120 предприятий, сопровождалась деловой программой в формате стратегической сессии. Ее участники рассказали о практике создания и внедрения инструментов искусственного интеллекта в производственной, научной и экономической сфере.
В Москве прошла Третья специализированная выставка «Робототехника и искусственный интеллект», на которой были представлены отечественные разработки и опыт применения новейших технологий. Выставочная экспозиция, собравшая, по данным организатора, – «ОВК «БИЗОН» – более 120 предприятий, сопровождалась деловой программой в формате стратегической сессии. Ее участники рассказали о практике создания и внедрения инструментов искусственного интеллекта в производственной, научной и экономической сфере.
Мера ответственности
 По мере распространения технологий ИИ специалисты все чаще задаются вопросами, связанными с правовым регулированием ответственности в сфере применения соответствующих инструментов. Характеризуя проблемы с правосубъектностью ИИ, президент Ассоциации юристов онлайн-бизнеса Елена Федорук сформулировала несколько ключевых вопросов: как установить степень автономности, в каком порядке возмещать ущерб, кто будет нести ответственность (носитель ИИ, разработчик, производитель, сособственник или оператор) и насколько этично «очеловечивание» ИИ.
По мере распространения технологий ИИ специалисты все чаще задаются вопросами, связанными с правовым регулированием ответственности в сфере применения соответствующих инструментов. Характеризуя проблемы с правосубъектностью ИИ, президент Ассоциации юристов онлайн-бизнеса Елена Федорук сформулировала несколько ключевых вопросов: как установить степень автономности, в каком порядке возмещать ущерб, кто будет нести ответственность (носитель ИИ, разработчик, производитель, сособственник или оператор) и насколько этично «очеловечивание» ИИ.
Несмотря на то, что несколько лет назад были предусмотрены экспериментальные правовые режимы применительно к цифровым инновациям, есть опыт использования ИИ-песочниц, в частности, в медицине, финтехе, банкинге, на транспорте, законодательство в данной сфере остается «лоскутным». Приоритетный нацпроект «Здравоохранение» предусматривает создание единого цифрового контура на основе Единой государственной информационной системы в сфере здравоохранения (ЕГИСЗ). С прошлого года могут рассчитывать на налоговые послабления (по налогу на прибыль организаций) компании, которые создают, приобретают и внедряют программы для ЭВМ и базы данных, включенные в единый реестр продуктов, относящихся к сфере ИИ.
Долгожданной инициативой эксперты называли внесение изменений в Закон об экспериментальных правовых режимах (цифровых «песочницах»). Предлагаемая норма касается рассмотрения случаев причинения вреда жизни, здоровью или имуществу человека либо имуществу юридического лица при реализации экспериментального правового режима в результате использования решений, созданных с применением ИИ. Формулировка, предусматривающая формирование комиссии в течение 30 дней с момента причинения вреда для установления его причин, как минимум требует доработки.
Сертификация и регламенты безопасности
 В настоящее время продолжается подготовка к сертификации робототехнических средств. Соответствующие работы ведутся ВНИИ ГОЧС. Начальник научно-исследовательского центра развития технических средств и технологий ВНИИ ГОЧС – руководитель органа по сертификации продукции «Сертификационный центр ГОЧС» Сергей Носков рассказал, как должна проходить сертификация робототехнических средств в соответствии с положениями технического регламента ЕАЭС 050/2021.
В настоящее время продолжается подготовка к сертификации робототехнических средств. Соответствующие работы ведутся ВНИИ ГОЧС. Начальник научно-исследовательского центра развития технических средств и технологий ВНИИ ГОЧС – руководитель органа по сертификации продукции «Сертификационный центр ГОЧС» Сергей Носков рассказал, как должна проходить сертификация робототехнических средств в соответствии с положениями технического регламента ЕАЭС 050/2021.
Сегодня требования к робототехнике установлены несколькими техническими регламентами Евразийского экономического союза, в том числе Техническим регламентом ЕАЭС 050/2021 «О безопасности продукции, предназначенной для гражданской обороны и защиты от чрезвычайных ситуаций природного и техногенного характера». Документ, разработанный ВНИИ ГОЧС, вступил в силу с 1 июня 2023 г. Вместе с тем до 1 января 2025 г. предусмотрен переходный период, чтобы участники процесса успели подготовиться к обязательной сертификации.
Эксперт напомнил о том, что упомянутый регламент определяет требования безопасности к аварийно-спасательным робототехническим средствам. На этапе подготовки к соблюдению норм ТР ЕАЭС 050/2021 выяснилось, что имеющихся аккредитованных испытательных лабораторий сегодня недостаточно. Область аккредитации лаборатории ВНИИ ГОЧС «Испытаний и оценки соответствия аварийно-спасательных средств» расширяется.
Для решения поставленных задач предстоит разработать дополнительные стандарты, в том числе обеспечивающие возможность соблюдения требований ТР ЕАЭС 050/2021. Речь идет о межгосударственном ГОСТе (определяющем общие технические требования и методы испытаний робототехнических средств для проведения аварийно-спасательных работ) и национальном ГОСТе (по общим техническим требованиям и методам испытаний робототехнических средств для гуманитарного разминирования).
Компьютерное зрение на производстве
 Технологии компьютерного зрения и машинного обучения для промышленности и городской инфраструктуры – одна из тем, которая была в центре внимания участников стратегической сессии. В выступлении генерального директора компании «Системы компьютерного зрения» (ГК ЛАНИТ) Дмитрия Степанова шла речь о проектах с применением компьютерного зрения. В частности, для ТМК НТЦ «Северский трубный завод» компания разработала AR-систему отслеживания состояния оборудования, а также систему обнаружения дефектов и измерения деталей. Создание цифрового двойника производства позволило предприятию контролировать состояние оснастки, агрегатов, полуфабрикатов и готовой продукции.
Технологии компьютерного зрения и машинного обучения для промышленности и городской инфраструктуры – одна из тем, которая была в центре внимания участников стратегической сессии. В выступлении генерального директора компании «Системы компьютерного зрения» (ГК ЛАНИТ) Дмитрия Степанова шла речь о проектах с применением компьютерного зрения. В частности, для ТМК НТЦ «Северский трубный завод» компания разработала AR-систему отслеживания состояния оборудования, а также систему обнаружения дефектов и измерения деталей. Создание цифрового двойника производства позволило предприятию контролировать состояние оснастки, агрегатов, полуфабрикатов и готовой продукции.
Хорошие перспективы у AR-систем, которые используются для обучения, развлечений, строительства и обслуживания городской инфраструктуры, подземных сетей, отмечают специалисты. Технологии компьютерного зрения применяются в сельском хозяйстве, например, для определения состояния зрелости культур и классификации растений.
В корпоративном портфеле компании и такой кейс, как создание системы для ведения учета круглой древесины. Измерения проводятся с помощью мобильного приложения (офлайн). Решение предоставляет возможность определить объем древесины в штабеле, на лесовозе, при сплаве. При этом погрешность составляет менее 3%, утверждают в компании.
На сессии руководитель компании «Системы компьютерного зрения» рассказал также о проекте GEO AI, системе анализа геоинформационных данных для оптимизации городской инфраструктуры.
3D с интеллектом
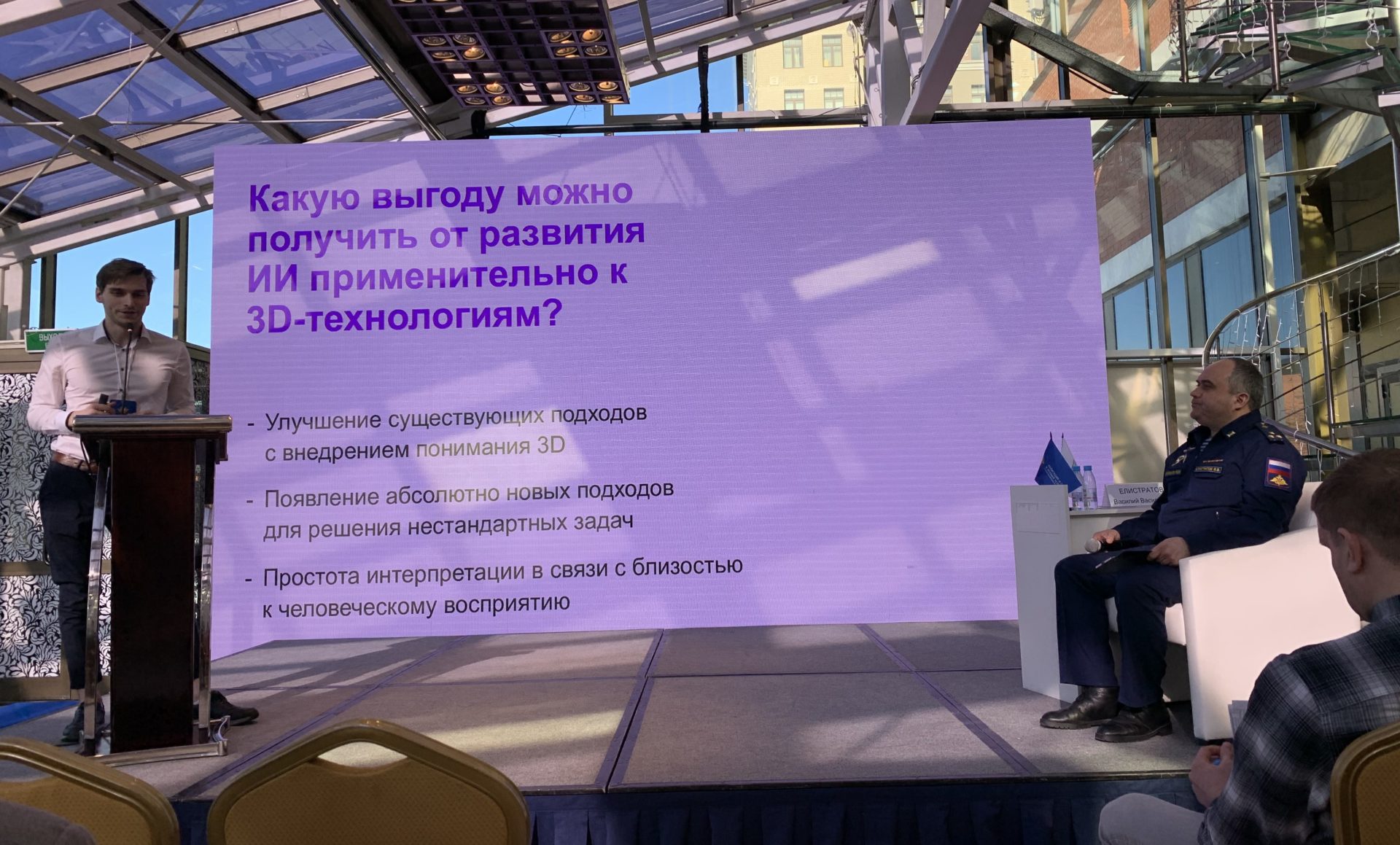 О пользе технологии ИИ для развития 3D и перспективах его применения в этих целях говорил руководитель направления машинного обучения компании «Мен ин Дев» Савелий Батурин. Любую точку пространства можно представить тремя координатами. И чем больше у системы ИИ будет понимания относительно истинной природы вещей (их формы, объема), тем легче она справится с задачами, которые раньше были под силу только человеку. Подобная интеграция приводит к улучшению существующих и созданию новых подходов к решению нестандартных задач.
О пользе технологии ИИ для развития 3D и перспективах его применения в этих целях говорил руководитель направления машинного обучения компании «Мен ин Дев» Савелий Батурин. Любую точку пространства можно представить тремя координатами. И чем больше у системы ИИ будет понимания относительно истинной природы вещей (их формы, объема), тем легче она справится с задачами, которые раньше были под силу только человеку. Подобная интеграция приводит к улучшению существующих и созданию новых подходов к решению нестандартных задач.
 Уже сейчас индустрия способна дать нам многое. Солидная база систем машинного обучения по работе с 3D позволяет, например, обеспечить реконструкцию тела человека в реальном времени при помощи моделей SMPL или реконструкцию объектов заданного класса (HSP). Переданное модели изображение объекта возвращается в виде 3D. Такие модели можно интегрировать в системы ИИ, получая аналог воображения, что позволяет взаимодействовать с наблюдаемыми объектами, представляя их форму, объем и т. д.
Уже сейчас индустрия способна дать нам многое. Солидная база систем машинного обучения по работе с 3D позволяет, например, обеспечить реконструкцию тела человека в реальном времени при помощи моделей SMPL или реконструкцию объектов заданного класса (HSP). Переданное модели изображение объекта возвращается в виде 3D. Такие модели можно интегрировать в системы ИИ, получая аналог воображения, что позволяет взаимодействовать с наблюдаемыми объектами, представляя их форму, объем и т. д.
Еще один тип систем – по реконструкции сцены (NeRF, Gaussian Splatting). Если NeRF предполагает глубокое обучение для представления сцены как непрерывной трехмерной функции, то в Gaussian Splatting применяются классические техники компьютерной графики, создается проекция трехмерных данных на двумерную плоскость изображения. В модели передается небольшой набор изображений, и этого достаточно для получения сцены целиком. Тем самым удается воспроизводить изображения с произвольного ракурса, которого не было в существовавшей модели.
 Большой интерес представляет решение задачи SLAM (Simultaneous Localization and Mapping – одновременная локализация и построение карты). Данный метод применяется в мобильных автономных средствах для построения карты неизвестной территории или для обновления имеющейся карты. При этом одновременно контролируются текущее местоположение и пройденный путь. В настоящее время SLAM – одна из ключевых задач робототехники. Можно строить карты пространств, в которые помещается робот. С выполнением аналогичной задачи справляются дроны при детектировании пожаров на объекте.
Большой интерес представляет решение задачи SLAM (Simultaneous Localization and Mapping – одновременная локализация и построение карты). Данный метод применяется в мобильных автономных средствах для построения карты неизвестной территории или для обновления имеющейся карты. При этом одновременно контролируются текущее местоположение и пройденный путь. В настоящее время SLAM – одна из ключевых задач робототехники. Можно строить карты пространств, в которые помещается робот. С выполнением аналогичной задачи справляются дроны при детектировании пожаров на объекте.
Большая часть систем требуют наличия дорогостоящих и зачастую крупногабаритных датчиков по типу лидаров, радаров, камер глубины и т. д. При реализации нейросетевых подходов достаточно использовать GP-видео, доступное с цифровой камеры. В области беспилотного транспорта отказались от лидаров в пользу цифровых камер, которые размещаются по периметру авто. Аналогичный подход весьма эффективен и в случае применения дронов. По словам эксперта, решение задач SLAM при помощи цифровой камеры даст возможность специалистам преодолеть немалое количество проблем, характерных для современной робототехники.
Способность и умение нейросетей, систем ИИ воспринимать 3D-пространства позволят сделать большой шаг в построении и развитии умных городов, создании умных помощников, беспилотных автомобилей. Все эти устройства будут помогать человеку в управлении инфраструктурой, обеспечат повышение качества обслуживания городской среды и ее безопасности. Современные программные продукты достаточно развиты для воплощения подобных идей в жизнь.


